


SENGLEA - speciál na Tug Towing (2. část)

Název eskortní remorkéry se používá pro remorkéry speciálně navržené pro generování řídicích a brzdných sil pro doprovod lodí na dlouhé vzdálenosti s relativně vysokou rychlostí. Tento článek popisuje chování lodi a některé pracovní manévry.
V dnešním díle bych se s vámi podělil o některé chytrosti, které se mi podařilo vyhledat na internetu. Jeden popisuje jak je dvojitá ploutev naprosto úžasná. Druhý popisuje, jak se má doprovodný remorkér chovat při manévrech.
Vždycky mě fascinovalo řízení lodi s plnohodnotnými funkcemi a manévry. Hodně dobře mi jezdí můj remorkér TR-8. Na remorkéru ovládám nezávisle otáčky motoru a natočení dýzy a kormidel. Když se hodně snažím a nefouká moc vítr, tak s celým soulodím dokážu jet částečně do boku. Tento manévr používám hlavně při vjíždění do doků.
Podařilo se mi např. projet soutěžní trať Naviga v kategorii F4 s délkou soulodí 5,15 metrů. Více o tom si můžete přečíst v článku Grado 2018 se soulodím Tug Towingu.
Na soutěžích Tug Towingu jsem jezdil už jenom s Kalarkou, se kterou jsme většinou tahal vlek. S tímto novým remorkérem by bylo skvělé jezdit hlavně vzadu, kam se nikomu moc nechce. Obvykle platí pravidlo, že když někdo jede vpředu a tahá, tak by měl jet, jako když má dva vleky. Samozřejmě máme tu nějaké odborníky, kteří se i vzadu snaží. Když to někdo opravdu umí, dají se tím ušetřit minuty ze soutěžního času.
Už jsem si některé manévry zkoušel s Kalarkou loni na Rokytce. Roman tahal Velkého Kačera a já mu sekundoval na zádi. Samozřejmě, že na lehkém protiproudu to funguje o dost lépe než na klidné vodě.
Doprovodné vlečné lodě (Escort tugs)
Tento popis odkazuje na dokument Thesis_RPM_Schillings_DAMEN_Public.pdf
- Název eskortní remorkéry se používá pro remorkéry speciálně navržené pro generování řídicích a brzdných sil pro doprovod lodí na dlouhé vzdálenosti s relativně vysokou rychlostí.
- Generovaná síla vlečného lana doprovodného remorkéru je obecně vyšší než síla generovaná v podmínkách přístavu. To je na rozdíl od přístavních remorkérů, které generují nejvyšší sílu při nízkých rychlostech.
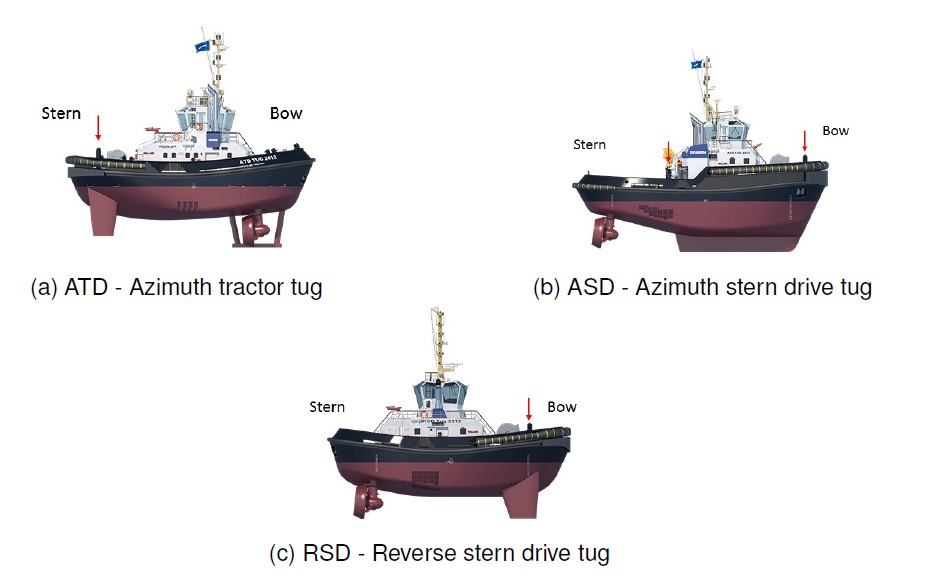
- Typy doprovodných remorkérů, které lze nalézt v přístavech po celém světě, se vyznačují čtyřmi aspekty: typem a umístěním pohonu, umístěním skegu (skeg je výběžek trupu, na kterém je uchyceno kormidlo, chrání kormidlo a zvyšuje jeho pevnost) a umístěním vlečného bodu. Hlavní typy, které vyrábí DAMEN, jsou znázorněny na obrázku. Umístění tažného bodu je na obrázku označeno červenou šipkou.
Režimy doprovodu
Doprovod je definován jako aktivní (nouzové) řízení, brzdění a ovládání doprovázené lodi remorkérem, přičemž rychlost vpředu eskortované lodi je v typickém rozsahu rychlostí 6 až 12 uzlů. Primární kategorie doprovodných provozních režimů, které používají operátoři vlečných vozidel, jsou definovány jako metoda přímého tažení, metoda nepřímého tažení a kombinovaná metoda
Režim přímého tažení
V režimu přímého tažení je přítlačná síla přímo aplikována pro vytvoření síly vlečného lana, přičemž hydrodynamické vztlakové a odporové síly nehrají žádnou významnou roli. Tato metoda se používá, když je ke zpomalení doprovázeného plavidla zapotřebí pouze brzdná síla.
Dvě přímé metody jsou zpětné zastavení „reverse arrest“ a příčné zastavení „transverse arrest“.
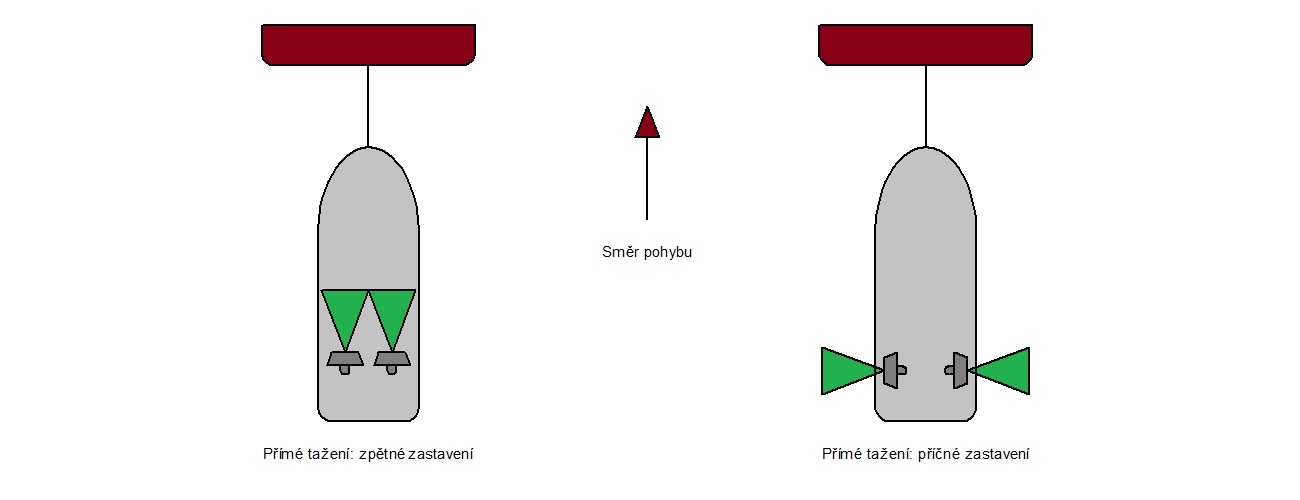
- Pozice = Zpětné zastavení - Z pohony působí silou přímo proti směru pohybu
- Pozice = Příčné zastavení - zahrnuje orientaci Z pohonu kolmo k toku, aby bylo dosaženo toho, že oba usměrňují vodu směrem ven pod úhlem 90°. To je vysoce efektivní při vyšší rychlosti.
Režim nepřímého tažení a kombinovaný režim
Režim nepřímého vlečení je metoda, jak aplikovat síly řízení a brzdění na doprovázenou loď, zejména při vyšší rychlosti. Tradiční režim zahrnuje využití hydrodynamických charakteristik trupu a přívěsků remorkéru ke generování vztlakových a odporových sil orientací remorkéru pod nenulovými úhly vybočení ke směru pohybu (také označované jako úhel driftu).
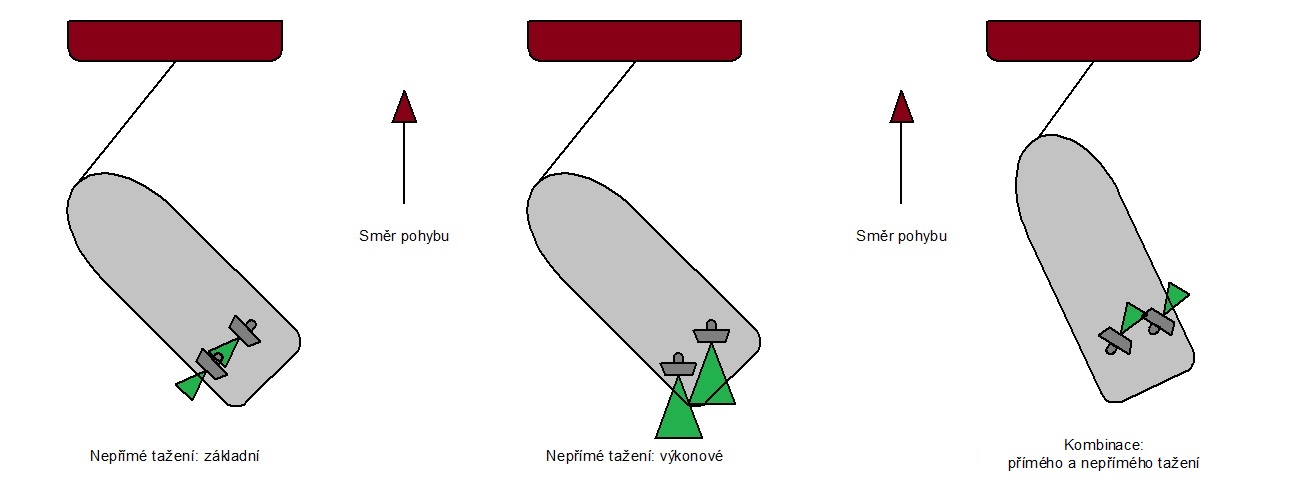
- Pozice = Základní - v nepřímém režimu je síla vlečného lana generována primárně hydrodynamickými silami působícími na trup a skeg, přičemž tah slouží výhradně k udržení požadovaného úhlu snosu.
- Pozice = Výkonové - v nepřímém režimu se příčná složka tahu používá k udržení požadovaného úhlu snosu, zatímco významná podélná složka tahu je aplikována v dopředném směru remorkéru a zvyšuje sílu řízení. Tento režim se obvykle používá k vytvoření maximálních řídicích sil při vysokých rychlostech.
- Pozice = Kombinace - je kombinací přímého a nepřímého režimu. V kombinovaném režimu je použit stejný princip jako u výkonového režimu, kromě toho, že podélná složka tahu je aplikována spíše dozadu než dopředu. Tento režim se často používá při vysoké rychlosti pro vytvoření vysokých brzdných sil.
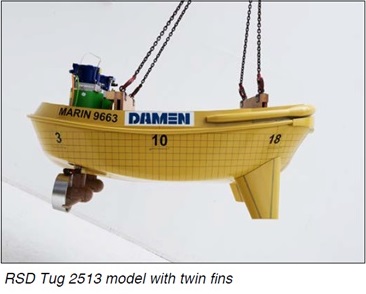
Reverse Stern Drive (RSD)
Tento popis odkazuje na dokument Damen-RSD-Tug-2513.pdf
RSD Tug 2513 je výsledkem let výzkumu a vývoje společnosti DAMEN. Design kombinuje prvky remorkérů ATD a ASD a vytváří třídu plavidla, které má speciálně navrženou příď, což mu umožňuje vždy ovládat příď jako první. Výsledkem je remorkér, který je stejně účinný při přídi a zádi.
Na přídi jsou umístěny dva velké profily ve tvaru křídla, známé také jako ploutve. Plavidlo je vybaveno dvěma Z pohony umístěnými na zádi plavidla. Tyto tlačné jednotky mají schopnost otáčet se o 360° kolem své osy z, a proto mohou poskytovat plný tah v jakémkoli požadovaném směru.
Porovnání manévrů pro ASD a RSD remorkéry
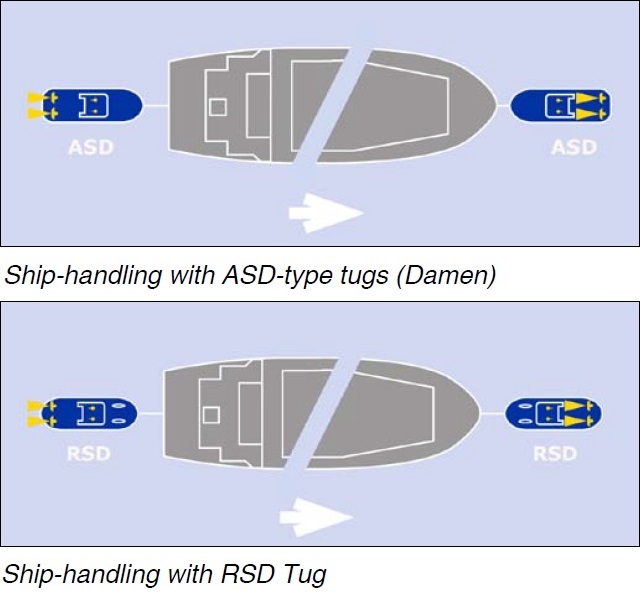
- Obvyklým způsobem, jak tuto operaci provést, je remorkér ASD nebo konvenční vlečné tažení přes zadní palubu, ale toto představuje zvýšené riziko kvůli zakopnutí. Alternativou je pro tuto operaci použít druhý typ plavidla, jako je ATD.
- Nicméně remorkér ASD nebo ATD, které plují zádí, mají tu nevýhodu, že záď není navržena jako „příď“, která by mohla ovlivnit výkon vlečení v důsledku vodní tříště, vln nebo vody na palubě.
- Koncepce RSD je navržena jako dokonalý remorkér pro manipulaci s lodí, který lze provozovat účinným a bezpečným způsobem během pomoci na přídi a přídi plavidla vplouvajícího do přístavu.
Designová výzva
Zvýšené požadavky na bezpečnost provozu zavádějí potřebu širších remorkérů, aby byla zajištěna dostatečná stabilita pro splnění bezpečnostních požadavků. Délka remorkéru by měla být co nejvíce zkrácena – za prvé, aby bylo možné manévrovat v omezených prostorech v přístavech, a za druhé z hlediska nákladů. Velikost asistovaných plavidel neustále roste. Velikost přístavů však ne, což vede k ještě vyšším nárokům na remorkéry. V důsledku toho to má za následek nízký poměr délky k šířce (délka/šířka) u nové konstrukce remorkéru, což vede k inherentní nestabilitě kurzu samotného trupu. Vysoký tah generovaný lodními šrouby Z pohonu lze dodávat v libovolném směru, což má za následek vysoké řídicí síly, a to i při malých úhlech listů lodního šroubu.
S principem dvou remorkéru RSD se Damen snažil o perfektní vlastnosti v obou směrech plavby. Jak víme, směrová stabilita je důležitá a zvláště při plavbě s dýzami napřed. Provoz remorkéru ASD z přídě na příď již vyžaduje plnou pozornost kapitána s ohledem na bezpečnost, a proto jsou optimální plavební vlastnosti životně důležité.
Damen patentovaná konfigurace Twin Fin® byla úspěšně použita na populárním ATD Tug 2412.
Výpočty CFO úhlu driftu zjistily, že boční síla generovaná dvojitými ploutvemi je větší než z jednoduchého středového skegu. Výpočty také zjistily, že boční síly a točivé momenty pro obě konfigurace dvojitých ploutvý jsou podobné.
Modelové zkoušky
Model remorkéru z uhlíkového kompozitu byl vyroben v měřítku 1:12,2.
Výsledky těchto testů ukazují, že konstrukce dvojité ploutve je velmi účinná pro zlepšení manévrovatelnosti kompaktních remorkérů pro manipulaci s lodí.
Bylo to demonstrováno již u ATD Tug 2412, ale nyní se také ukazuje, že teorie stále platí s jiným designem trupu. To zdůrazňuje, že RSD Tug 2513 je bezpečný a snadno ovladatelný remorkér, který dokáže zajistit vysoký tah a předvídatelnou ovladatelnost.
Řízení / ovládání remorkéru
Při sledování videa ASD remorkéru jsem si vymyslel, jak by se to celé dalo ovládat. Nebude to úplně jednoduché. Stejně tak nebude jednoduché s tím jezdit, ale s tím mi pomůže manuál pro kapitány ASD, který je vidět také na videu dole.
Model bude vybaven jako skutečný remorkér dvěma Z-pohony. Lodní šroub se bude točit jenom jedním směrem. K reverzaci bude sloužit otočení Z-pohonu. Z-pohon bude řízen krokovým motorkem podle vychýlení kniplu na vysílači. Každé pohonné ústrojí bude řízeno nezávisle.
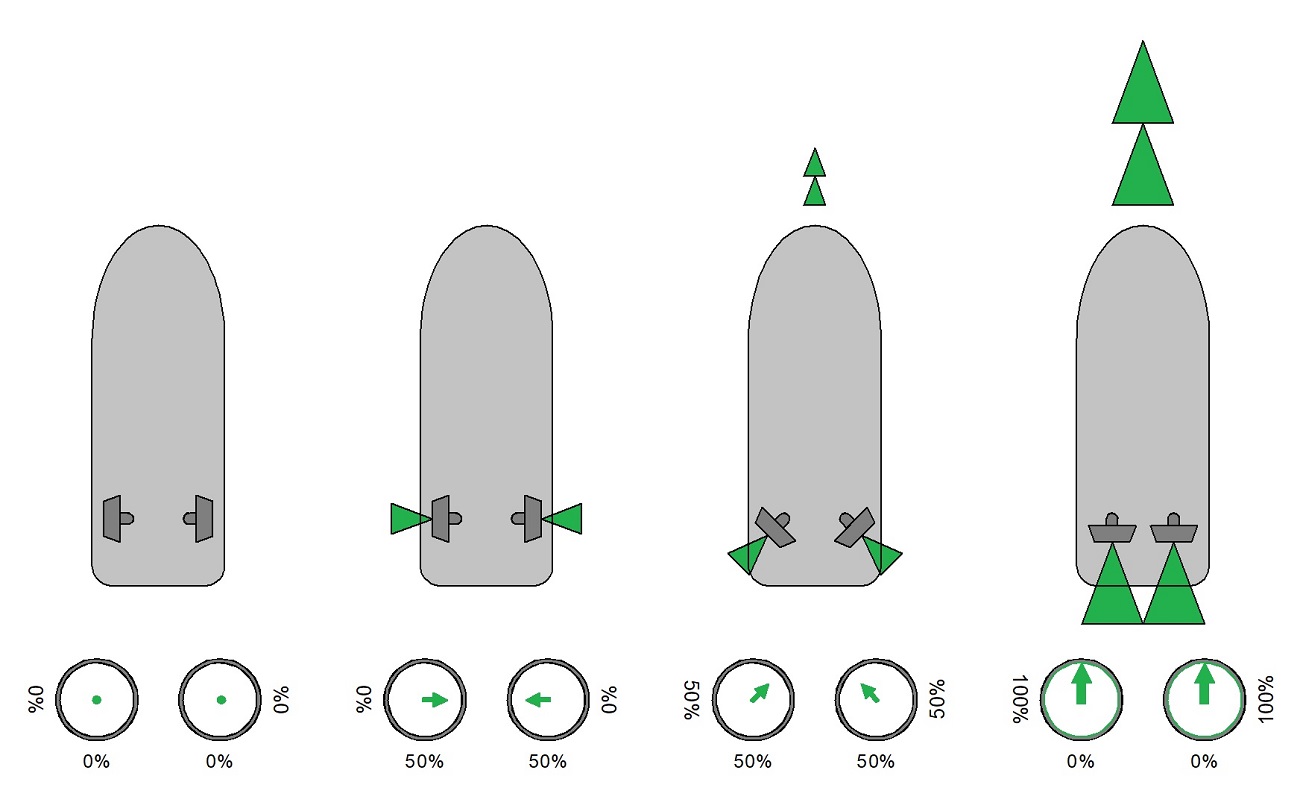
- Pozice = Výchozí pozice - obě páčky kniplu na vysílači jsou v klidu / motory stojí / remorkér stojí
- Pozice = Pracovní pozice - obě páčky kniplu jsou posunuty do středu vysílače, remorkér čeká na změnu směru vpřed nebo vzad / motory se otáčejí na 50% / remorkér stojí (pokud budou na obou motorech nastaveny stejné otáčky)
- Pozice = Pohyb dopředu - obě páčky kniplu jsou posunuty dopředu pod úhlem 45° a nastaveny na 2x 50 % / motory se otáčejí na 50 % / remorkér se pohybuje dopředu, dopředný výkon remorkéru bude 2x 35 %, protože dochází ke skládání rychlosti
- Pozice = Max. výkon dopředu - obě páčky kniplu jsou posunuty dopředu a nastaveny na 2x 100 % / motory se otáčejí na 100 % / remorkér se pohybuje dopředu, dopředný výkon remorkéru bude 2x 100 % jedná se o maximální rychlost remorkéru
Na vysílačce budu mít přepínač, který mi bude měnit smysl jízdy remorkéru vůči vleku (R1 vpředu/R sólo nebo R2 vzadu/R sólo). Myslím tím dlouhodobě. S tím souvisí i přepnutí pozičních světel včetně červené a zelené. Pro krátkodobou směru jízdy dám páčky prostě obráceně.
Tento remorkér dokáže plout sólo jak přídí napřed, tak zádí napřed. Pokud pluje sólo a to zádí napřed, tak v tomto režimu by mohly fungovat obě vodní děla.
Jak jsem už zmínil, tak o natáčení Z pohonů se bude starat krokový motor. Oba kanály, které se ovládají páčkou kniplu, budou muset být upraveny v remorkéru pomocí Arduino modulu tak, aby řídily krokový motor a dávaly regulátoru motoru pokyn k otáčení motorem. V remorkéru by mohly být malé LCD panely, na kterých by se mohly zobrazovat základní informace o natočení Z pohonu a o výkonu motoru. Světelný modul bude ovládán také Arduino modulem.
Všechno bude moje vlastní výroba. Zkušenosti s Arduinem modulem mám ze světelného modulu na Landroveru Defenderu D90. Tam jsem všechno naprogramoval jak u reálného auta.
S řízením krokových motorů zatím nemám žádné zkušenosti. Tak to zase bude pěkné bastlení.
Pokračování příště.
Snad už bude nějaká ukázka toho jak to funguje.
Robert









Pozvánky
Roupovské lodičky
Kde: Koupaliště Roupov
Kdy: 18. 4.![]()
Soutěž lodních maket NS
Kde: Barbora, Duchcov
Kdy: 18. 4.![]()
Setkání mládeže + Footy
Kde: Zátoka Cikánka, Jablonec nad Nisou
Kdy: 25. 4.![]()
Jarní Lužiny + soutěž dětí
Kde: Nepomucký rybník, Praha
Kdy: 25. 4.![]()
Galantská kotva
Kde: rybník Koštan, Kajál u Galanty
Kdy: 25. 4.![]()
Otvírání mola
Kde: Židovský rybník, Lány
Kdy: 25. 4.![]()
Moravský pohár
Kde: Nádrž v Sedlejově
Kdy: 25. - 26. 4.![]()
Stupavská para
Kde: Vachalkov rybník, Stupava
Kdy: 2. 5.![]()
Sraz lodních modelářů
Kde: Křelovský rybník, Křelov u Olomouce
Kdy: 2. 5. od 10:00![]()
Sraz lodních modelářů
Kde: Jezírka v Holandské ulici, Brno
Kdy: 3. 5. od 15:00![]()
Evropský pohár NSS
Kde: Kristýna, Hrádek nad Nisou
Kdy: 1. - 3. 5.![]()
Víkend s MoNaKem
Kde: rybník Homole u Hotelu Luna, Kouty
Kdy: 8. - 10. 5.![]()
Mistrovství ČR stolních modelů C
Kde: Muzeum v Děčíně
Kdy: 8. - 10. 5.![]()
Mikroklima s MoNaKem
Kde: U restaurace v Parku Přátelství, Praha-Prosek
Kdy: 28. 5.![]()
MiČR lodních maket NS + žáků
Kde: Autocamp Třeboň
Kdy: 12. - 14. 6.![]()
Česko-rakouský pohár NS
Kde: ATC Podroužek, Netolice
Kdy: 20. - 21. 6.![]()







